|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|||||||||
|
|
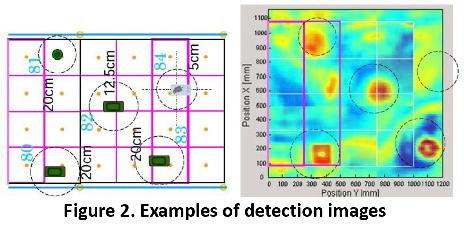
The IUMD Robot System recognizes projectiles and different mines, mapping their coordinates with up to 1cm accuracy. It uses a 2m long pneumatic lever holding the magnetic sensors vertically with a Gyroscope System Patent Pending . The data sent from the unit on to the remote control unit is already a picture of the detected metallic part. The identified objects can be therefore destroyed using the built-in back-sliding disrupter with the help of an infrared camera. These manoeuvres are done securely using the remote control from a distance of over 100m. The incoming data, both pictures of found metallic parts and video input can be stored onto the notebook built in the remote control, for later analysis. The screen on the remote control unit shows two parallel pictures:
The unit has front shields to avoid the fragmentation effect. The system recognizes metallic parts in up to 2m depth below the ground level (100fTesla sensor sensitivity).The unit can be used during day and night it uses two infrared lights in the camera and two 50W halogen lights on the front. It can be used in extreme conditions: from -10°C up to +60°C; it is dustproof it works even in desert conditions. |
Back View
 |
|||||
|
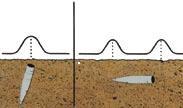
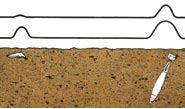
Steps of the mapping process:
|
|
|||||
 Side
View Side
View |
Properties of the IUMD Robot System:
|
|||||
|
Main parts of IUMD Robot System:
|
 Back View |
|||||
|
 |
|||||
|
||||||
|
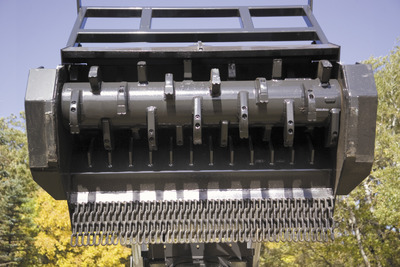
 Front View with Mine Detector Sensors |
|||||

ROBOT Remote control unit
|
||||||
|
|
 ROBOT Transporter unit. |
|||||
|
|
Mine DESTRUCTION UNIT (optional, with special ROBOT mount system not shown). |
|||||
|
BOBCAT based MINE SWEEPER advanced unit (goes before the ROBOT).
|
|
|||||
|
The ORLANDO Systems group is managed by Mr.Theo Basch, President theo@orlando-systems.com |

Hand Held Mine Detection unit, with SuperConductor Sensors, 100fTesla Sensitivity. Can be used to find deep sunken mines and Ceramic Mines.
|
|||||